Cara Cek Kode QR Organisasi Vivo dengan Mudah dan Cepat

Pernahkah Anda menjumpai kode QR (Quick Response) yang berlogo Vivo? Kode QR ini merupakan salah satu cara yang disediakan Vivo …
Pernahkah Anda menjumpai kode QR (Quick Response) yang berlogo Vivo? Kode QR ini merupakan salah satu cara yang disediakan Vivo …
Ingin menjenguk orang terkasih yang sedang dirawat di RS Pondok Indah? Penting untuk mengetahui aturan terbaru mengenai jam besuk yang …

Menjenguk orang terkasih yang sedang dirawat di rumah sakit merupakan salah satu bentuk dukungan moral yang penting. Namun, setiap rumah …

Merencanakan kunjungan untuk menjenguk orang terkasih di Rumah Sakit (RS) Dr. Oen Surakarta? Mengetahui informasi jam besuk dan tata tertib …

Rumah Sakit Umum Daerah (RSUD) Wates, yang terletak di Kabupaten Kulon Progo, Daerah Istimewa Yogyakarta, menyediakan layanan kunjungan bagi keluarga …
Merencanakan kunjungan untuk menjenguk orang terkasih di RSI Klaten? Pastikan Anda memahami aturan jam besuk yang berlaku untuk memberikan kenyamanan …
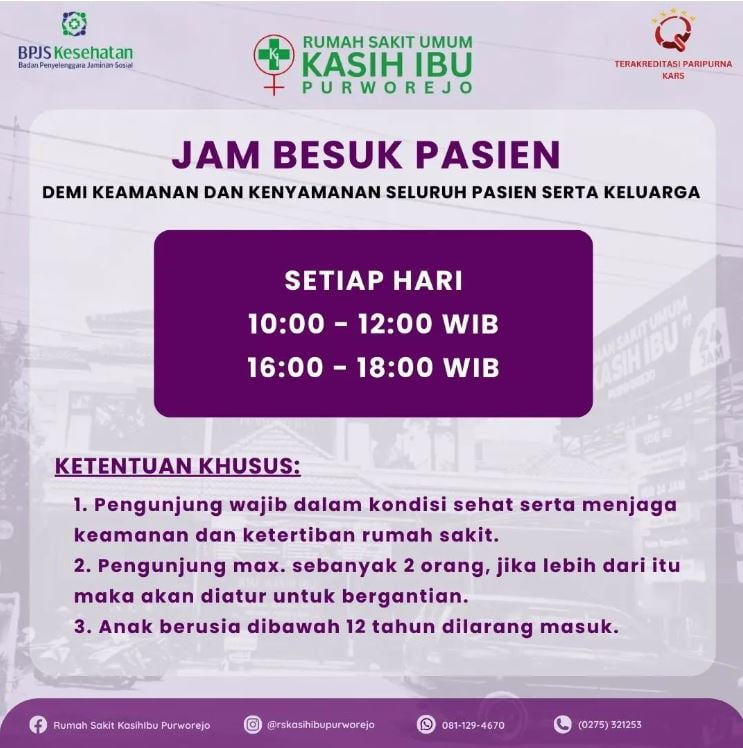
Kesehatan merupakan harta yang tak ternilai. Ketika orang terkasih dirawat di Rumah Sakit Kasih Ibu Purworejo, tentu Anda ingin menjenguk …

Rumah Sakit Kasih Ibu Surakarta memahami pentingnya dukungan keluarga bagi pasien yang sedang dirawat. Oleh karena itu, rumah sakit menyediakan …

Meringankan beban dan memberikan dukungan moral kepada orang tercinta yang sedang dirawat di rumah sakit merupakan hal yang penting. Di …

Menjenguk orang tercinta yang dirawat di rumah sakit merupakan momen penting untuk memberikan dukungan dan semangat. Bagi Anda yang ingin …

Menemani orang terkasih yang sedang dirawat di rumah sakit merupakan hal yang penting. Di Rumah Sakit Katolik St. Vincentius a …
Meringankan beban dan memberikan semangat kepada orang tercinta yang sedang dirawat di rumah sakit merupakan hal yang penting. Bagi keluarga …